Wat is een point cloud?


Bezig met een renovatieproject? Wilt u een team informeren over de as-built situatie? Dan kan een point cloud uitkomst bieden. Met behulp van 3D-laserscanners wordt informatie over de bouwplaats snel en accuraat verzameld en gevisualiseerd. Maar wat is een point cloud eigenlijk?
De point cloud is een verzameling van meetpunten die door een 3D-laserscanner gevonden zijn. Net als een ‘echte’ wolk bestaat de point cloud uit een enorm aantal minuscule punten die samen een 3D-massa vormen. Alleen draait het bij een point cloud om een digitale 3D-massa met datapunten in plaats van druppels.
Hoe het werkt
Bij het scannen van een gebied registreert de laserscanner een groot aantal gegevenspunten die worden teruggekaatst door randen en oppervlakken. Dit kunnen bijvoorbeeld muren, ramen, leidingen of staalconstructies zijn. Met behulp van de geregistreerde X-, Y- en Z-coördinaten van alle punten wordt een nauwkeurige 3D-representatie van het gescande gebied gemaakt: de point cloud, ofwel de ‘puntenwolk’.
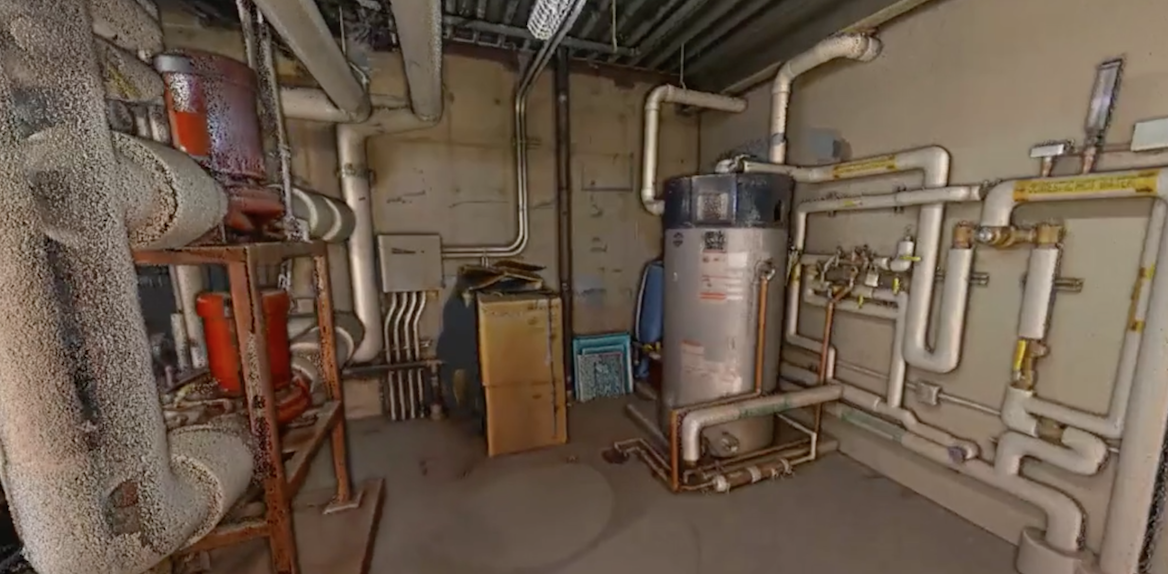
Een point cloud legt dus een ruimte vast door de punten te registreren die de oppervlakken binnen die ruimte bedekken. Voordat de point cloud in het BIM-proces gebruikt kan worden, moet deze eerst visueel worden gemaakt. Dit kan door de scan te importeren in point cloud-modelleer software. Het resultaat ziet eruit als een pixel-achtige, digitale versie van de bouwplaats, zoals bij dit voorbeeld van een olympisch zwembad:
In deze scan vormen de vele kleine punten duidelijk samen een geheel. De objecten rondom het zwembad zijn goed te onderscheiden en de scan geeft een idee van de grootte van de ruimte.
Omdat de zichtlijn van een scanner geblokkeerd kan worden, kunnen vaak niet alle elementen in een ruimte in een keer geregistreerd worden. Door vanaf verschillende locaties in een ruimte een scan te maken, kan een totaalbeeld gemaakt worden. De point cloud van het zwembad is bijvoorbeeld samengesteld nadat de ruimte vanuit zes verschillende locaties is gescand. In dit geval is daarvoor de RealWorks software van Trimble gebruikt.

Van point cloud naar BIM
Het genereren van een point cloud, en het daarmee het visueel maken van de datapunten, is een essentiële tussenstap tussen het maken van een 3D-scan en het BIM-model. Er zijn drie stappen om een bouwplaats van een scan naar BIM-model te krijgen:
- Gebruik eerst een 3D-laserscanner om de afmetingen in uw omgeving te scannen.
- Importeer vervolgens de point cloud die de scanner maakt in de software voor het modelleren van point cloud.
- Exporteer uw point cloud vanuit de software en importeert u deze in uw BIM-systeem, waar u de data omzet naar 3D-objecten.
Nadat u de point cloud in uw BIM-software heeft geïmporteerd, kunt u het point cloud model gebruiken om bijvoorbeeld snel en accuraat de installaties te modelleren of controleren. Zo integreert u dus actuele informatie over de bouwplaats in uw BIM-model - en verbindt u BIM met de bouwplaats.
Tekst: Stabiplan
B2Build Academy verenigt het volledige bouwteam. Want discipline-overschrijdend denken is de beste garantie voor toekomstgerichte oplossingen. B2Build Academy biedt kennis en inspiratie, trends en evoluties.
Onze bouw partners





Word partner en zet proactief in op kennisdeling, samenwerking en dialoog tussen alle actoren binnen de bouwsector. Ontwikkel samen met niet-concurrentiële partners leadgenereratie op basis van gepersonaliseerde content rond referentieprojecten, hybride events en performante online marketing.
Onze kennispartner

Onze corporate partners

BIM-platform maakt deel uit van het B2Build Mediaplatform. Onze corporate partners onderschrijven de doelstellingen van B2Build, waarbij we ons richten tot de verschillende actoren in de bouwsector. Steeds met het oog op duurzame en circulaire ontwikkelingen of toepassingen in functie van samenleving en eindgebruiker.
Sluit gratis aan bij B2Build Academy en geniet van deze voordelen
- Toegang tot onze zes thematische bouwplatformen
- Deelname aan inspiratie-events rond actuele kennis uit de bouwsector
- Netwerking met het bouwteam
- Rechtstreeks contact met 60 fabrikanten